#include <ed/entity.h>#include <ed/world_model.h>#include <ed/kinect/fitter.h>#include <geolib/math_types.h>#include <opencv2/highgui/highgui.hpp>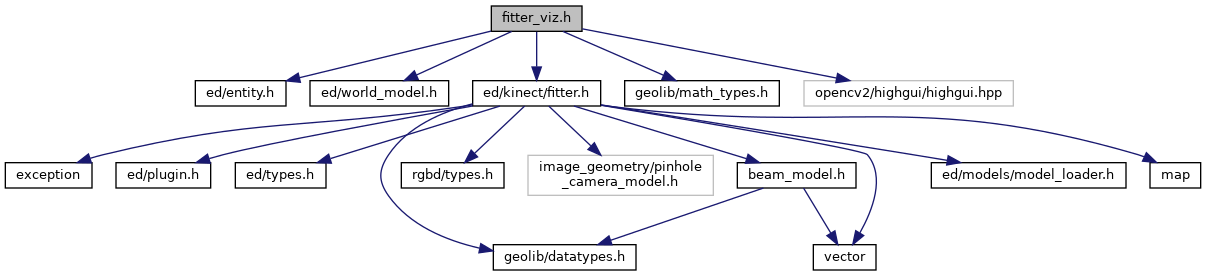
Go to the source code of this file.
Functions | |
| void | drawLine (const cv::Mat &canvas, geo::Vec2 point1, geo::Vec2 point2, geo::Transform2 pose, float resolution, int origin_x, int origin_y, cv::Scalar colour) |
| drawLine, draw a line in 2D metric space on a canvas More... | |
| void | drawShape2D (const cv::Mat &canvas, const Shape2D &shape, geo::Transform2 pose, float resolution, int origin_x, int origin_y, cv::Scalar colour) |
| drawShape2D draw a 2D shape defined in 2D metric space on a canvas. More... | |
| cv::Scalar | entity_colour (0, 255, 255) |
| cv::Scalar | fitted_colour (243, 192, 15) |
| cv::Scalar | measurement_colour (161, 17, 187) |
| cv::Scalar | sensor_colour (0, 255, 0) |
| cv::Point | sensorlocation (sensor_x, sensor_y) |
| cv::Mat | visualizeFitting (EntityRepresentation2D entity, geo::Transform2 sensor_pose, geo::Transform2 entity_pose, geo::Transform2 fitted_pose, FitterData fitterdata, bool estimateEntityPose) |
Variables | |
| int | canvas_height = 600 |
| float | canvas_resolution = 100 |
| int | canvas_width = 800 |
| int | sensor_x = canvas_width/2 |
| int | sensor_y = canvas_height * 8/10 |
Function Documentation
◆ drawLine()
| void drawLine | ( | const cv::Mat & | canvas, |
| geo::Vec2 | point1, | ||
| geo::Vec2 | point2, | ||
| geo::Transform2 | pose, | ||
| float | resolution, | ||
| int | origin_x, | ||
| int | origin_y, | ||
| cv::Scalar | colour | ||
| ) |
drawLine, draw a line in 2D metric space on a canvas
- Parameters
-
canvas canvas to draw the line to point1 first point defining the line in map frame point2 second point defining the line in map frame pose position of the sensor in map frame. resolution pixels per meter origin_x location in pixels of the sensor on the canvas origin_y location in pixels of the sensor on the canvas colour colour to draw the line
Definition at line 39 of file fitter_viz.h.
◆ drawShape2D()
| void drawShape2D | ( | const cv::Mat & | canvas, |
| const Shape2D & | shape, | ||
| geo::Transform2 | pose, | ||
| float | resolution, | ||
| int | origin_x, | ||
| int | origin_y, | ||
| cv::Scalar | colour | ||
| ) |
drawShape2D draw a 2D shape defined in 2D metric space on a canvas.
- Parameters
-
canvas canvas to draw to shape 2D shape to draw pose pose in meters of the center of the shape. resolution pixels per meter origin_x postion of the origin in pixels origin_y position of the origin in pixels colour colour to draw the shape in.
Definition at line 78 of file fitter_viz.h.
◆ entity_colour()
| cv::Scalar entity_colour | ( | 0 | , |
| 255 | , | ||
| 255 | |||
| ) |
◆ fitted_colour()
| cv::Scalar fitted_colour | ( | 243 | , |
| 192 | , | ||
| 15 | |||
| ) |
◆ measurement_colour()
| cv::Scalar measurement_colour | ( | 161 | , |
| 17 | , | ||
| 187 | |||
| ) |
◆ sensor_colour()
| cv::Scalar sensor_colour | ( | 0 | , |
| 255 | , | ||
| 0 | |||
| ) |
◆ sensorlocation()
◆ visualizeFitting()
| cv::Mat visualizeFitting | ( | EntityRepresentation2D | entity, |
| geo::Transform2 | sensor_pose, | ||
| geo::Transform2 | entity_pose, | ||
| geo::Transform2 | fitted_pose, | ||
| FitterData | fitterdata, | ||
| bool | estimateEntityPose | ||
| ) |
create an image displaying the fitted entity along with the information used in fitting.
Displays the fitted entity, sensor data used in fitting and the original pose of the entity prior to fitting.
Note that sensor_pose, entity_pose and fitted_pose must be expressed in the same coordinate frame
- Parameters
-
entity shape of the entity that was fitted sensor_pose pose of the sensor entity_pose estimated pose of the entity prior to fitting fitted_pose estimated pose of the entity after fitting fitterdata fitterdata used in fitting the entity. estimateEntityPose whether or not the fitting encountered errors
- Returns
Definition at line 114 of file fitter_viz.h.
Variable Documentation
◆ canvas_height
| int canvas_height = 600 |
Definition at line 16 of file fitter_viz.h.
◆ canvas_resolution
| float canvas_resolution = 100 |
Definition at line 17 of file fitter_viz.h.
◆ canvas_width
| int canvas_width = 800 |
Definition at line 15 of file fitter_viz.h.
◆ sensor_x
| int sensor_x = canvas_width/2 |
Definition at line 19 of file fitter_viz.h.
◆ sensor_y
| int sensor_y = canvas_height * 8/10 |
Definition at line 20 of file fitter_viz.h.
