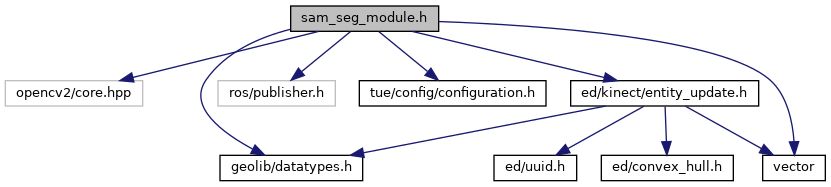
#include <opencv2/core.hpp>#include <geolib/datatypes.h>#include <ros/publisher.h>#include <tue/config/configuration.h>#include "ed/kinect/entity_update.h"#include <vector>
Include dependency graph for sam_seg_module.h:
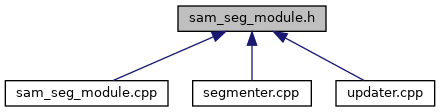
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Functions | |
| void | overlayMasksOnImage_ (cv::Mat &rgb, const std::vector< cv::Mat > &masks) |
| Overlay segmentation masks on the RGB image for visualization purposes. More... | |
| void | publishSegmentationResults (const cv::Mat &filtered_depth_image, const cv::Mat &rgb, const geo::Pose3D &sensor_pose, std::vector< cv::Mat > &clustered_images, ros::Publisher &mask_pub_, ros::Publisher &cloud_pub_, std::vector< EntityUpdate > &res_updates) |
| Publish segmentation results and pointcloud estimation as ROS messages. More... | |
| std::vector< cv::Mat > | SegmentationPipeline (const cv::Mat &img, tue::Configuration &config) |
| Segmentation pipeline that processes the input image and generates segmentation masks. More... | |
Function Documentation
◆ overlayMasksOnImage_()
| void overlayMasksOnImage_ | ( | cv::Mat & | rgb, |
| const std::vector< cv::Mat > & | masks | ||
| ) |
Overlay segmentation masks on the RGB image for visualization purposes.
- Parameters
-
rgb The RGB image to overlay masks on. masks The segmentation masks to overlay.
Definition at line 59 of file sam_seg_module.cpp.
◆ publishSegmentationResults()
| void publishSegmentationResults | ( | const cv::Mat & | filtered_depth_image, |
| const cv::Mat & | rgb, | ||
| const geo::Pose3D & | sensor_pose, | ||
| std::vector< cv::Mat > & | clustered_images, | ||
| ros::Publisher & | mask_pub_, | ||
| ros::Publisher & | cloud_pub_, | ||
| std::vector< EntityUpdate > & | res_updates | ||
| ) |
Publish segmentation results and pointcloud estimation as ROS messages.
- Parameters
-
filtered_depth_image The filtered depth image to publish. rgb The RGB image to publish. sensor_pose The pose of the sensor. clustered_images The clustered segmentation masks. mask_pub_ The ROS publisher for the mask images. cloud_pub_ The ROS publisher for the point cloud data. res_updates The entity updates to publish.
Definition at line 112 of file sam_seg_module.cpp.
◆ SegmentationPipeline()
| std::vector<cv::Mat> SegmentationPipeline | ( | const cv::Mat & | img, |
| tue::Configuration & | config | ||
| ) |
Segmentation pipeline that processes the input image and generates segmentation masks.
- Parameters
-
img The input RGB image to segment.
- Returns
- std::vector<cv::Mat> The generated segmentation masks.
Definition at line 14 of file sam_seg_module.cpp.
