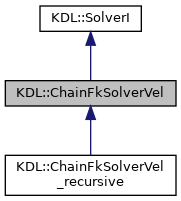
This abstract class encapsulates a solver for the forward velocity kinematics for a KDL::Chain. More...
#include <chainfksolver.hpp>
Public Member Functions | |
| virtual int | JntToCart (const JntArrayVel &q_in, FrameVel &out, int segmentNr=-1)=0 |
| virtual int | JntToCart (const JntArrayVel &q_in, std::vector< KDL::FrameVel > &out, int segmentNr=-1)=0 |
| virtual void | updateInternalDataStructures ()=0 |
| virtual | ~ChainFkSolverVel () |
 Public Member Functions inherited from KDL::SolverI Public Member Functions inherited from KDL::SolverI | |
| virtual int | getError () const |
| Return the latest error. More... | |
| SolverI () | |
| Initialize latest error to E_NOERROR. More... | |
| virtual const char * | strError (const int error) const |
| virtual | ~SolverI () |
Additional Inherited Members | |
| Public Types inherited from KDL::SolverI | |
| enum | { E_DEGRADED = +1, E_NOERROR = 0, E_NO_CONVERGE = -1, E_UNDEFINED = -2, E_NOT_UP_TO_DATE = -3, E_SIZE_MISMATCH = -4, E_MAX_ITERATIONS_EXCEEDED = -5, E_OUT_OF_RANGE = -6, E_NOT_IMPLEMENTED = -7, E_SVD_FAILED = -8 } |
| Protected Attributes inherited from KDL::SolverI | |
| int | error |
| Latest error, initialized to E_NOERROR in constructor. More... | |
Detailed Description
This abstract class encapsulates a solver for the forward velocity kinematics for a KDL::Chain.
Definition at line 74 of file chainfksolver.hpp.
Constructor & Destructor Documentation
◆ ~ChainFkSolverVel()
|
inlinevirtual |
Definition at line 98 of file chainfksolver.hpp.
Member Function Documentation
◆ JntToCart() [1/2]
|
pure virtual |
Calculate forward position and velocity kinematics, from joint coordinates to cartesian coordinates.
- Parameters
-
q_in input joint coordinates (position and velocity) out output cartesian coordinates (position and velocity)
- Returns
- if < 0 something went wrong
Implemented in KDL::ChainFkSolverVel_recursive.
◆ JntToCart() [2/2]
|
pure virtual |
Calculate forward position and velocity kinematics, from joint coordinates to cartesian coordinates.
- Parameters
-
q_in input joint coordinates (position and velocity) out output cartesian coordinates for all segments (position and velocity)
- Returns
- if < 0 something went wrong
Implemented in KDL::ChainFkSolverVel_recursive.
◆ updateInternalDataStructures()
|
pure virtual |
Update the internal data structures. This is required if the number of segments or number of joints of a chain/tree have changed. This provides a single point of contact for solver memory allocations.
Implements KDL::SolverI.
Implemented in KDL::ChainFkSolverVel_recursive.
The documentation for this class was generated from the following file:
