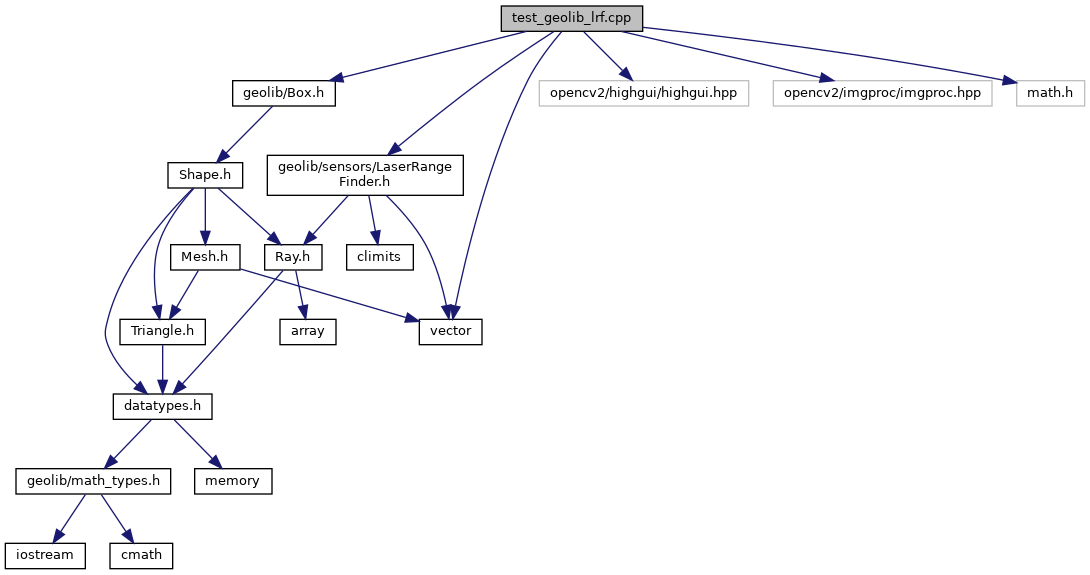
#include "geolib/Box.h"#include "geolib/sensors/LaserRangeFinder.h"#include <opencv2/highgui/highgui.hpp>#include <opencv2/imgproc/imgproc.hpp>#include <math.h>#include <vector>
Include dependency graph for test_geolib_lrf.cpp:
Go to the source code of this file.
Functions | |
| std::vector< cv::Point2i > | getObjectCornerPoints (unsigned int x0, unsigned int y0, double x_obj, double y_obj, double L, double W, double obj_yaw, double pix_per_m) |
| int | main (int argc, char **argv) |
Function Documentation
◆ getObjectCornerPoints()
| std::vector<cv::Point2i> getObjectCornerPoints | ( | unsigned int | x0, |
| unsigned int | y0, | ||
| double | x_obj, | ||
| double | y_obj, | ||
| double | L, | ||
| double | W, | ||
| double | obj_yaw, | ||
| double | pix_per_m | ||
| ) |
Definition at line 13 of file test_geolib_lrf.cpp.
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 53 of file test_geolib_lrf.cpp.
