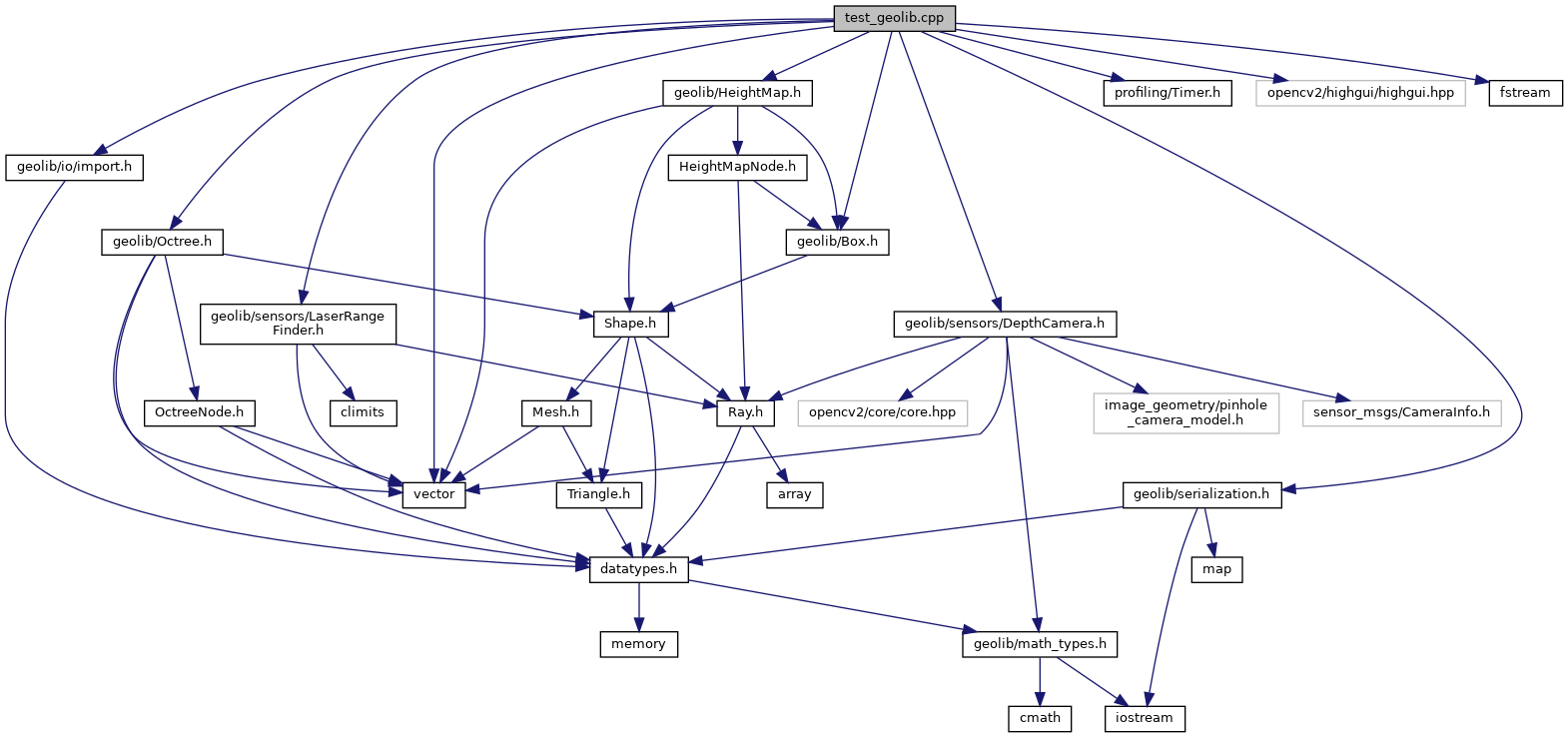
#include <geolib/Octree.h>#include <geolib/Box.h>#include <geolib/HeightMap.h>#include <geolib/io/import.h>#include <geolib/serialization.h>#include <geolib/sensors/DepthCamera.h>#include <geolib/sensors/LaserRangeFinder.h>#include <profiling/Timer.h>#include <opencv2/highgui/highgui.hpp>#include <fstream>#include <vector>
Include dependency graph for test_geolib.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
| double | renderDepthCamera (cv::Mat &image, const geo::Shape &shape, bool show) |
| double | renderLRF (cv::Mat &image, const geo::Shape &shape, bool show) |
Variables | |
| double | CANVAS_HEIGHT = 480 |
| double | CANVAS_WIDTH = 640 |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 91 of file test_geolib.cpp.
◆ renderDepthCamera()
| double renderDepthCamera | ( | cv::Mat & | image, |
| const geo::Shape & | shape, | ||
| bool | show | ||
| ) |
Definition at line 21 of file test_geolib.cpp.
◆ renderLRF()
| double renderLRF | ( | cv::Mat & | image, |
| const geo::Shape & | shape, | ||
| bool | show | ||
| ) |
Definition at line 52 of file test_geolib.cpp.
Variable Documentation
◆ CANVAS_HEIGHT
| double CANVAS_HEIGHT = 480 |
Definition at line 19 of file test_geolib.cpp.
◆ CANVAS_WIDTH
| double CANVAS_WIDTH = 640 |
Definition at line 18 of file test_geolib.cpp.
