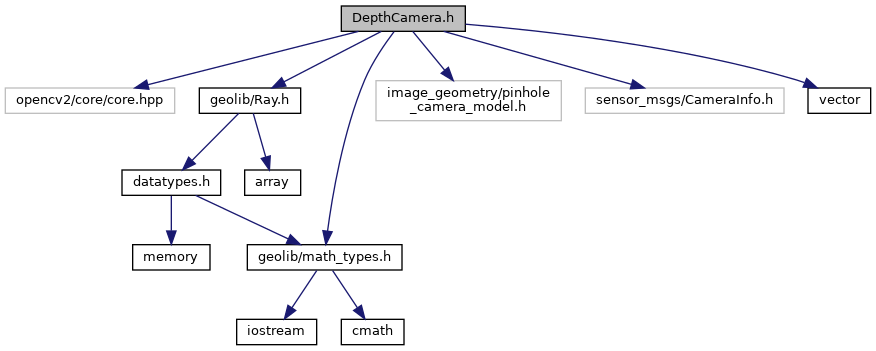
#include <opencv2/core/core.hpp>#include "geolib/Ray.h"#include "geolib/math_types.h"#include <image_geometry/pinhole_camera_model.h>#include <sensor_msgs/CameraInfo.h>#include <vector>
Include dependency graph for DepthCamera.h:
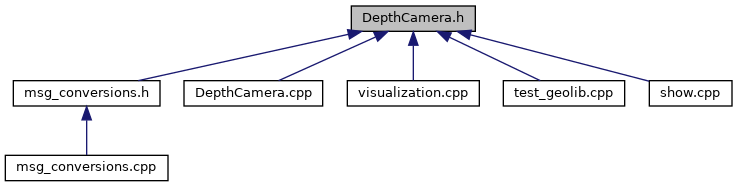
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | geo::DefaultRenderResult |
| class | geo::DepthCamera |
| struct | geo::RasterizeResult |
| class | geo::RenderOptions |
| class | geo::RenderResult |
Namespaces | |
| geo | |
Typedefs | |
| typedef std::vector< std::vector< void * > > | geo::PointerMap |
| PointerMap maps pixels in a depth image to an identifier. More... | |
| typedef std::vector< std::vector< int > > | geo::TriangleMap |
| TriangleMap maps pixels in a depth image to an index in the list of triangles in the mesh. Note: check with the corresponding pointermap to find which mesh is referred to! More... | |
Variables | |
| static PointerMap | geo::EMPTY_POINTER_MAP |
| static TriangleMap | geo::EMPTY_TRIANGLE_MAP |
