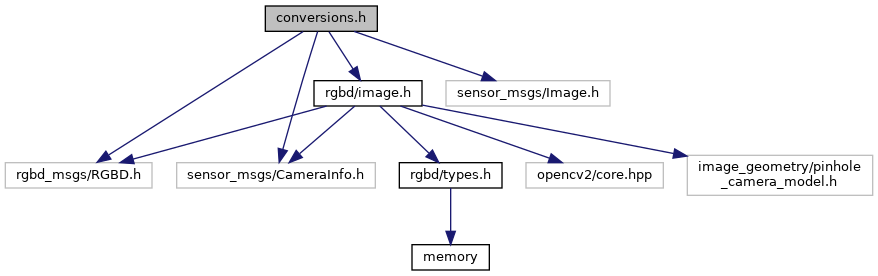
#include <rgbd_msgs/RGBD.h>#include <sensor_msgs/Image.h>#include <sensor_msgs/CameraInfo.h>#include "rgbd/image.h"
Include dependency graph for conversions.h:
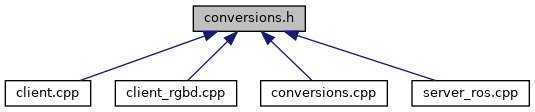
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| cv | |
| geo | |
| rgbd | |
Functions | |
| bool | rgbd::convert (const cv::Mat &image, const geo::DepthCamera &cam_model, sensor_msgs::Image &image_msg, sensor_msgs::CameraInfo &cam_model_msg) |
| Convert either a rgb or depth image to image and CameraInfo message. Also rectifies the image. More... | |
| bool | rgbd::convert (const cv::Mat &image, sensor_msgs::Image &image_msg) |
| Convert either a rgb or depth image, cv::Mat, to an image message. More... | |
| bool | rgbd::convert (const rgbd_msgs::RGBDConstPtr &msg, rgbd::Image *&image) |
| Convert rgbd message to an Image. More... | |
