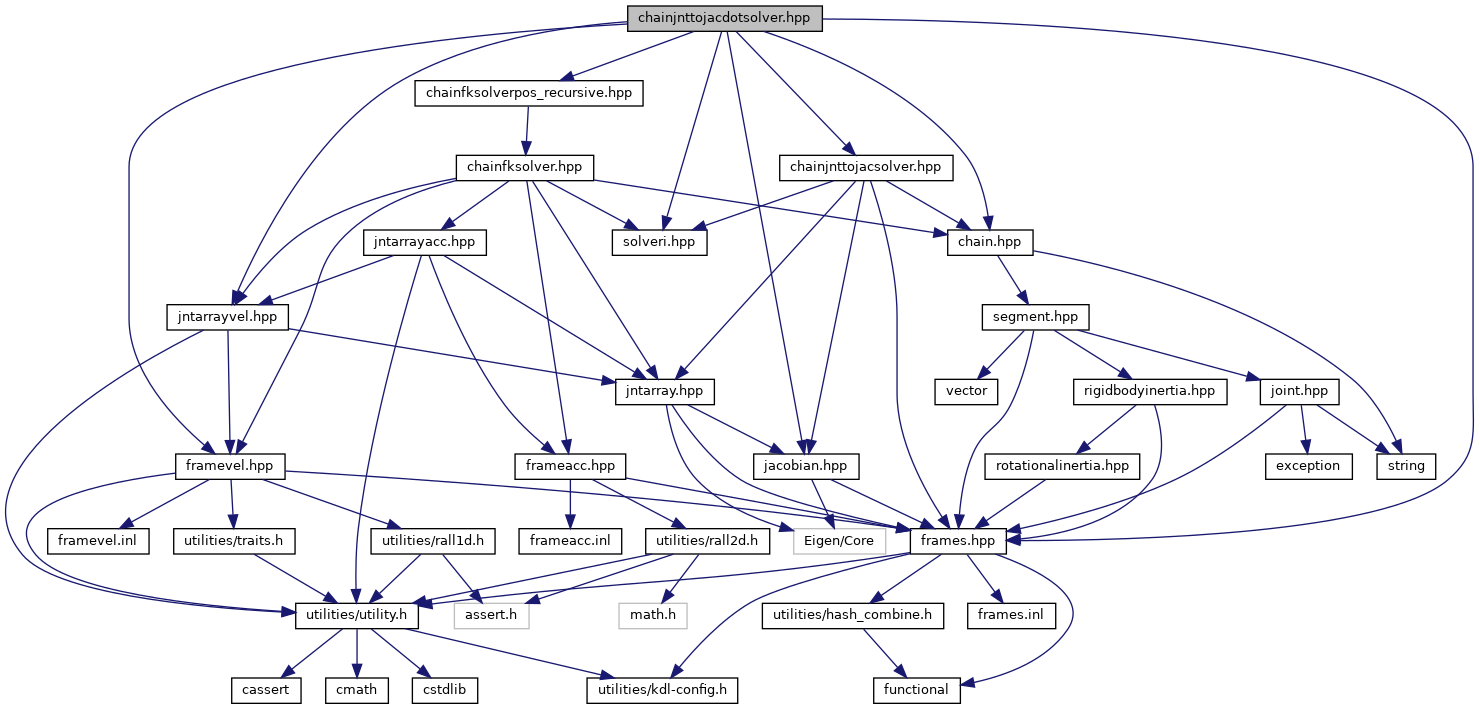
#include "solveri.hpp"#include "frames.hpp"#include "jntarrayvel.hpp"#include "jacobian.hpp"#include "chain.hpp"#include "framevel.hpp"#include "chainjnttojacsolver.hpp"#include "chainfksolverpos_recursive.hpp"
Include dependency graph for chainjnttojacdotsolver.hpp:
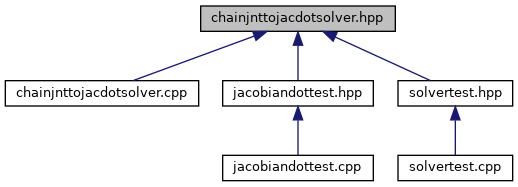
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | KDL::ChainJntToJacDotSolver |
| Computes the Jacobian time derivative (Jdot) by calculating the partial derivatives regarding to a joint angle, in the Hybrid, Body-fixed or Inertial representation. More... | |
Namespaces | |
| KDL | |
