computing inverse position kinematics using Levenberg-Marquardt. More...
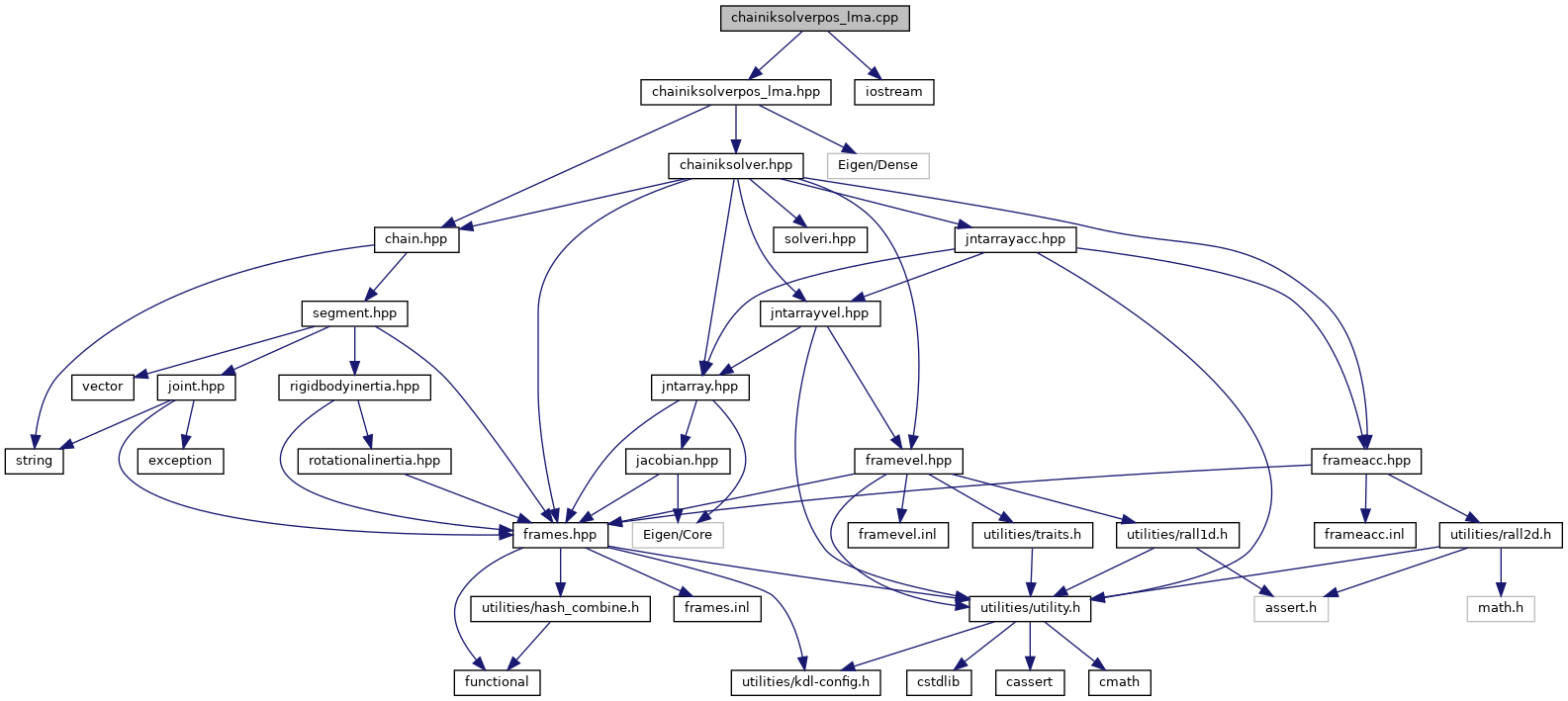
Include dependency graph for chainiksolverpos_lma.cpp:
Go to the source code of this file.
Namespaces | |
| KDL | |
Functions | |
| template<typename Derived > | |
| void | KDL::Twist_to_Eigen (const KDL::Twist &t, Eigen::MatrixBase< Derived > &e) |
Detailed Description
computing inverse position kinematics using Levenberg-Marquardt.
Definition in file chainiksolverpos_lma.cpp.
